







——DWIN Developer Forum වෙතින්
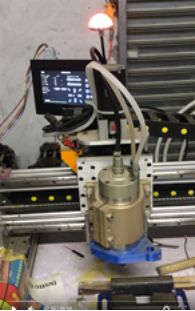
විසඳුම T5L චිප් ප්රධාන පාලනය ලෙස භාවිතා කරයි, අනුක්රමික වරාය 2 හරහා GRBL පාලනය කරයි, සහ අවබෝධ කර ගැනීම සඳහා X, Y සහ Z අක්ෂවල කැටයම් මාර්ග පාදක මාර්ගය ජනනය කිරීම සඳහා කැටයම් යන්ත්රයේ ප්රධාන එන්ජිම පාලනය කිරීමට මෝටරය ධාවනය කරයි. ස්වයංක්රීය කැටයම් මෙහෙයුම.එහි අලංකාර අතුරු මුහුණත, නිරවද්ය පාලනය, බහු අක්ෂ පාලනය සහ ස්වයංක්රීය මෙවලම් සැකසීම යන කාර්යයන් ඇත.
විස්තර:
1. DWIN අනුක්රමික වරාය 2 හරහා GRBL පාලනය කරන්න;
2. GRBL අනුක්රමික තොට පණිවිඩය, ඛණ්ඩනය සහ බාධා කිරීම් සංදර්ශකය අවබෝධ කරයි;
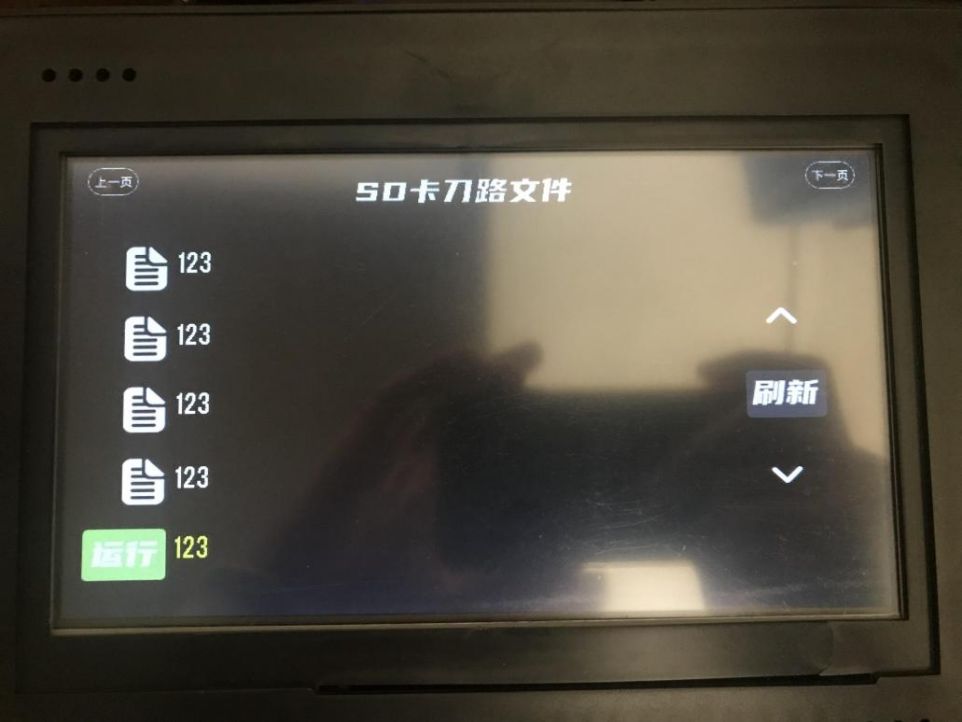
3. උපදෙස් යැවීම මගින් තිරය GRBL චලනය වැනි විවිධ කාර්යයන් පාලනය කරයි;
4. Weihong handwheel අතුරුමුහුණත නිර්වචනය සමඟ අනුකූල වන අත් රෝද පාලනයට සහාය වීම;
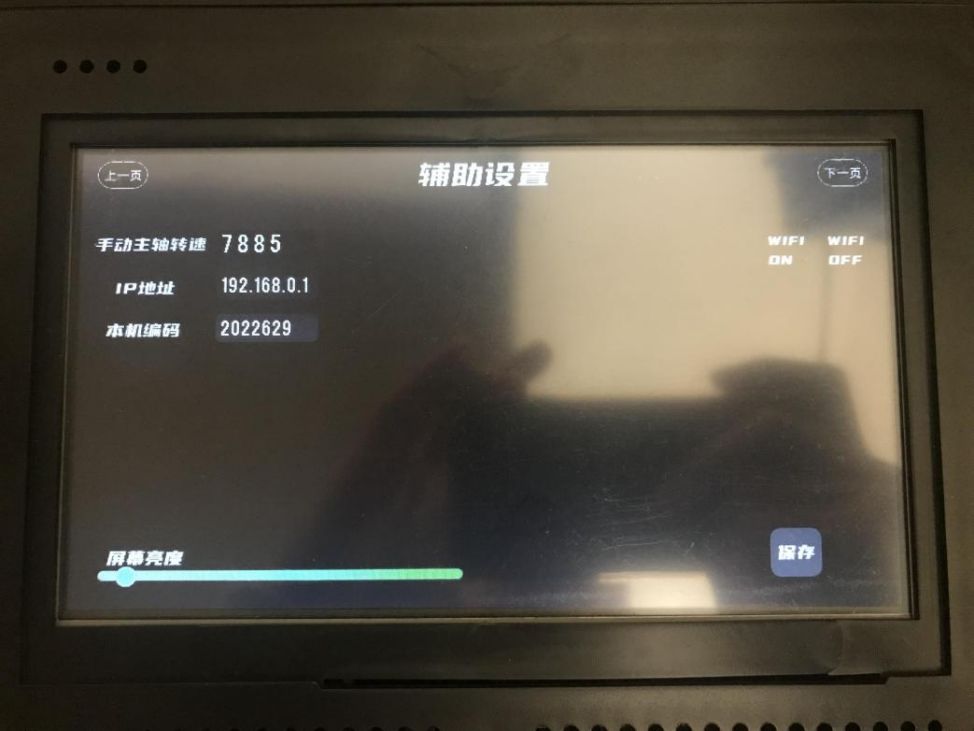
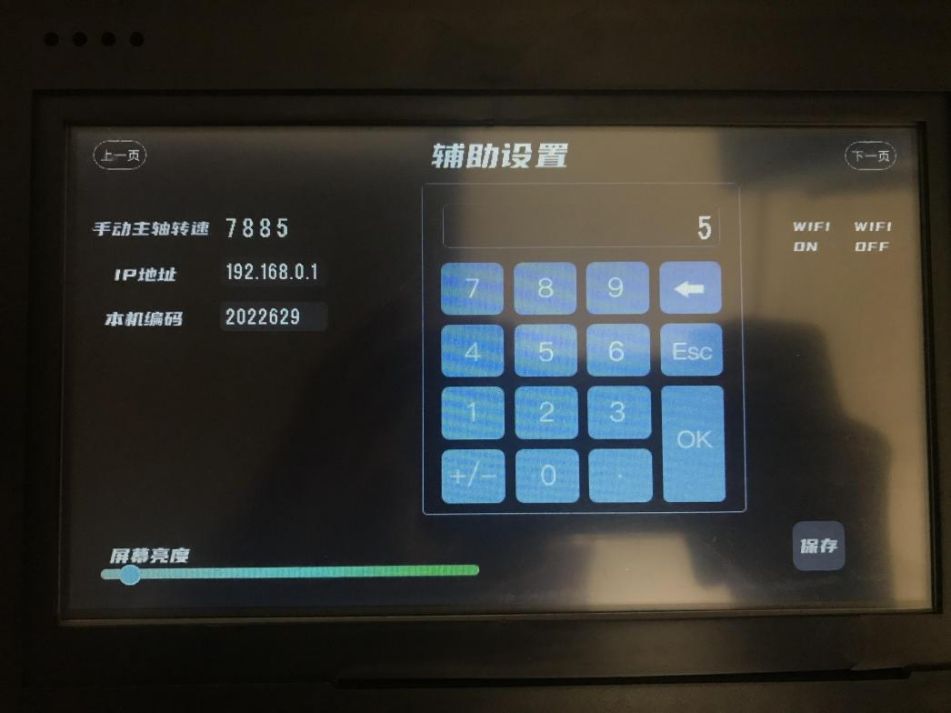
5. බලය විසන්ධි කිරීමෙන් පසු තිර පරාමිතීන් සුරැකිය හැක;
6. Idle, stop, and work වැනි තත්ත්ව පහන් සංදර්ශන කිරීමට WS2812 පාලනය කිරීමෙන්;
විසඳුම් නිර්මාණය:
(1) DGUS ඉංජිනේරු අතුරුමුහුණත් නිර්මාණ ඇඳීම

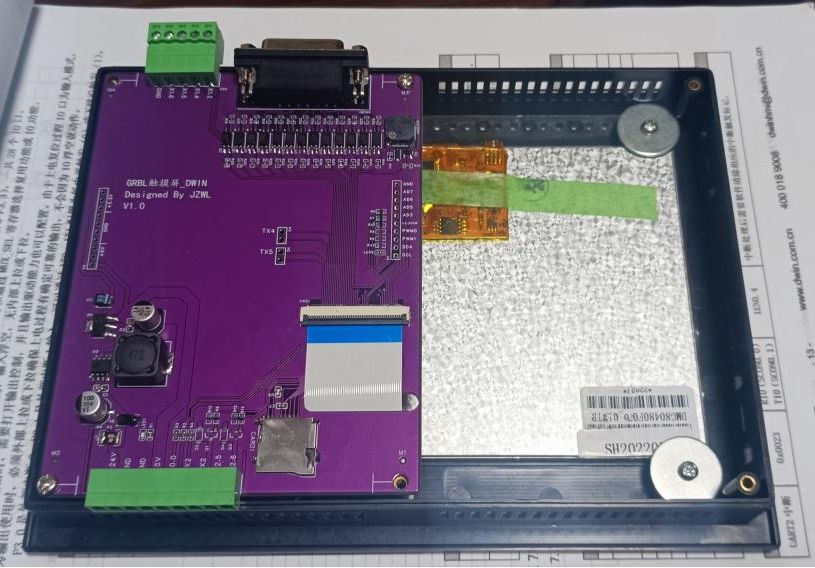
(2) පසුතල රූප සටහන

දැනුම්දීම:
1. GRBL හි ESP32 හට වෙනස් කිරීමකින් තොරව මුල් පිටපත භාවිතා කළ හැක;
2. Easytron සමඟින් තිරයේ PCB ගොනුවේ බාගැනීම් ඇමුණුම විවෘත කරන්න, එහි ක්රමානුරූප සටහන සහ PCB සෘජුවම ඔප්පු කළ හැක;
3. කර්නල් ගොනුව නවතම එක විය යුතුය.මෙම ව්යාපෘතිය ඇමුණුමේ ඇති කර්නල් අනුවාදය භාවිත කරන අතර කර්නලය වෙන වෙනම යාවත්කාලීන කළ යුතුය.
පසු කාලය: ජනවාරි-10-2023